How This Project Started
In January 2024, with the BITS Goa competition just a month away, we needed a line follower robot that could compete at the highest level. This wasn't about building a basic line follower—this was about pushing the limits of speed, accuracy, and reliability. As Robotics Head, I headed the entire development effort, leading the team through an intensive month of development that would culminate in All India Rank 7.
The challenge was clear: achieve maximum speed in the least amount of time while maintaining stability. Every component had to be optimized—mechanical design had to be stable yet sleek and fast, electronics had to handle motor heating and wiring challenges, and the code had to be perfected with meticulous PID tuning.
The challenge was clear: design a robot that could track a line at high speeds while maintaining accuracy. Most line followers are slow and cautious. We wanted speed without sacrificing precision. This required careful hardware selection, optimized PID control, and extensive testing.
The Problem We Wanted to Solve
Line following competitions reward speed, but speed without accuracy is useless. We needed to: - Track lines accurately at speeds up to 1.2 m/s - Handle sharp turns and varying line widths - Maintain stability at high speeds - Optimize hardware for minimal weight and maximum performance - Tune control algorithms for responsive yet stable behavior
The competition timeline was tight—about a month from start to competition day. Every design decision had to balance performance, reliability, and development time.
System Architecture & Design
Hardware Configuration
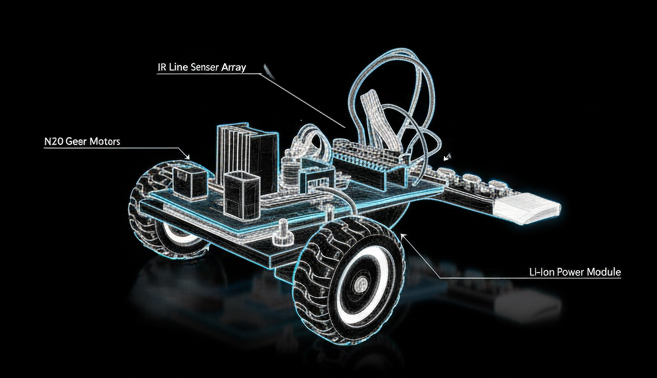
Sensor Array: We designed an 8-sensor IR array configuration. The sensor spacing and placement were critical—too close and we'd lose resolution, too far and we'd miss quick line transitions. The array provided sufficient information for accurate line position estimation while maintaining fast response times.
Motor System: - High-speed motors (600 RPM) for maximum velocity - L298 motor drivers for reliable control - Optimized gear ratios for speed vs. torque balance
Control Platform: - Arduino Nano for real-time control - Lightweight design for speed optimization - Efficient code for minimal processing delay
PID Control Algorithm
The heart of the system was a carefully tuned PID controller. The challenge was balancing: - Proportional (P): Responsiveness to line position errors - Integral (I): Correction for systematic errors - Derivative (D): Damping to prevent oscillations
Too much P and the robot oscillates. Too much I and it's sluggish. Too much D and it overreacts. Finding the right balance required systematic testing and tuning.
Hardware & Mechanical Aspects
Mechanical Design: Stable Yet Sleek and Fast
As Robotics Head, I oversaw the mechanical design with a clear requirement: the robot had to be stable yet sleek and fast. This meant balancing multiple competing requirements:
Stability Requirements: - Low center of gravity for stability at high speeds - Robust chassis to handle rapid acceleration and deceleration - Proper weight distribution for balanced performance - Strong mounting for all components
Speed Optimization: - Lightweight design to maximize acceleration - Aerodynamic considerations for reduced drag - Minimal friction in all moving parts - Optimized wheel design for maximum grip and speed
Sleek Design: - Compact form factor for maneuverability - Clean component placement for optimal balance - Minimal material usage without sacrificing strength - Professional appearance for competition presentation
The mechanical design had to achieve all three simultaneously—stability for reliability, sleekness for performance, and speed for competition success.
Weight Optimization
Every gram mattered. We focused on: - Lightweight chassis design - Minimal material usage without sacrificing strength - Optimized component placement for balance - Reduced friction in moving parts
Motor Performance & Heating Management
The motors needed to provide: - High speed capability - Sufficient torque for acceleration and turns - Reliable operation under load - Consistent performance across runs
Motor Heating Challenges: At high speeds, motor heating became a critical concern. As Robotics Head, I had to address: - Continuous operation at maximum speed causing temperature rise - Thermal management to prevent motor failure - Cooling strategies for extended operation - Monitoring motor temperature during testing - Balancing performance with thermal limits
We tested multiple motor configurations, balancing speed ratings with torque requirements and thermal characteristics. The final selection provided the performance we needed while maintaining reliability under thermal stress.
Sensor Placement
The 8-sensor IR array required precise placement: - Even spacing across the robot's width - Appropriate height above the ground - Calibration for consistent readings - Protection from ambient light interference
Wiring and Electronics Management
High-speed operation required careful attention to wiring: - Secure wire routing to prevent interference with moving parts - Proper wire gauge for current requirements - Clean wiring layout for reliability and maintainability - Protection from vibration and mechanical stress - Proper grounding and shielding for sensor accuracy
Electronics & Embedded Systems
Sensor Integration
The IR sensors provided analog readings that needed to be: - Calibrated for consistent thresholds - Processed quickly for real-time control - Filtered to reduce noise - Converted to line position estimates
Motor Control
The L298 motor drivers provided: - Bidirectional motor control - Speed control via PWM - Current protection - Reliable switching
The control loop needed to be fast enough to respond to line changes while maintaining smooth operation.
Power Management
Efficient power distribution was crucial: - Battery selection for capacity vs. weight - Voltage regulation for consistent sensor readings - Power distribution to motors and electronics - Monitoring for battery health
Software, Control & AI
PID Implementation
The PID controller calculated motor speed adjustments based on: - Current line position (from sensor array) - Desired position (center of line) - Error history (integral term) - Error rate of change (derivative term)
The algorithm needed to run in real-time with minimal delay. Every millisecond of processing time affected responsiveness.
Code Perfection Through PID Tuning
As Robotics Head, I emphasized that the code had to be perfected through meticulous PID tuning. This wasn't just about getting it to work—it was about achieving optimal performance.
Systematic Tuning Process: 1. Start with proportional control only 2. Add derivative for damping and stability 3. Add integral for steady-state accuracy 4. Fine-tune all three parameters together 5. Iterate based on performance metrics
Testing Methodology: We tested on multiple track configurations: - Straight sections (test maximum speed) - Sharp turns (test responsiveness and stability) - Varying line widths (test robustness) - Different surfaces (test reliability) - Extended runs (test motor heating and thermal performance)
Performance Metrics: Every tuning session measured: - Tracking accuracy percentage - Maximum sustainable speed - Stability during turns - Response time to line changes - Consistency across multiple runs
The code perfection process involved countless iterations, each one bringing us closer to the optimal balance between speed, accuracy, and stability.
Performance Optimization
Code optimization focused on: - Fast sensor reading and processing - Efficient PID calculations with minimal computational overhead - Minimal delay in control loop - Reliable execution under all conditions - Thermal-aware performance management
Testing, Failures & Fixes
Early Challenges
Oscillation Issues: Initial PID tuning caused the robot to oscillate around the line. Too much proportional gain created instability. Reducing P and increasing D solved this, but finding the right balance took multiple tuning sessions.
Speed vs. Accuracy Trade-off: Increasing speed initially reduced accuracy. We had to optimize both hardware (reducing weight, improving motor performance) and software (faster control response) to achieve high speed with maintained accuracy.
Track Variations: Different track configurations revealed weaknesses. Sharp turns required different tuning than straight sections. We developed a robust configuration that handled various scenarios.
Intensive Testing Period
The final week before competition involved: - Multiple test runs on different track configurations - Fine-tuning PID parameters - Hardware optimizations (friction reduction, motor tuning) - Performance validation
We logged performance metrics: - Tracking accuracy: 98% - Maximum speed: 1.2 m/s - Turn handling: Excellent - Reliability: Consistent across runs
Results & Achievements
Competition Performance
BITS Goa Competition - February 2, 2024: - Result: All India Rank 7 - Robot performed excellently on competition day - Validated all optimization efforts - Team recognition for technical achievement
The competition validated our approach: systematic optimization, careful tuning, and attention to detail paid off. The robot's performance matched our testing results, demonstrating reliability under competition pressure.
Technical Achievements
- 98% tracking accuracy at speeds up to 1.2 m/s
- Optimized hardware for maximum performance
- Robust PID control handling various track configurations
- Reliable operation across multiple test runs
What I Learned Leading This
Heading this development as Robotics Head taught me that competition robotics is about optimization under constraints. Time was limited, resources were finite, and every decision mattered. The goal was clear: achieve maximum speed in the least amount of time while maintaining stability.
Leading this project required balancing multiple competing requirements: mechanical design had to be stable yet sleek and fast, electronics had to handle motor heating and wiring challenges, and code had to be perfected through systematic PID tuning. Every aspect—from motor selection to wire routing to algorithm parameters—contributed to the final performance.
Technical Learnings: - PID control tuning methodology - Hardware-software co-optimization - Real-time control system design - Performance testing and validation
Project Management Learnings: - Managing tight timelines - Prioritizing optimization efforts - Balancing speed of development with quality - Team coordination under pressure
Competition Learnings: - Preparation strategies for competition - Handling competition day pressure - Learning from other teams - Post-competition analysis and reflection
Future Directions
While this specific competition is complete, the techniques learned apply to other projects: - PID control principles used in WALRUS navigation - Optimization methodologies for other robots - Real-time control experience valuable for autonomous systems - Competition experience informs future project planning
The line follower project demonstrated that focused, intensive development can achieve excellent results. The systematic approach—hardware optimization, careful algorithm tuning, extensive testing—is applicable to any robotics project.
---
From concept to All India Rank 7 in one month. This project proved that with the right approach, tight timelines can produce exceptional results.