Sahil Nakhuda
Robotics Engineer
Building robots that solve real problems and make a difference
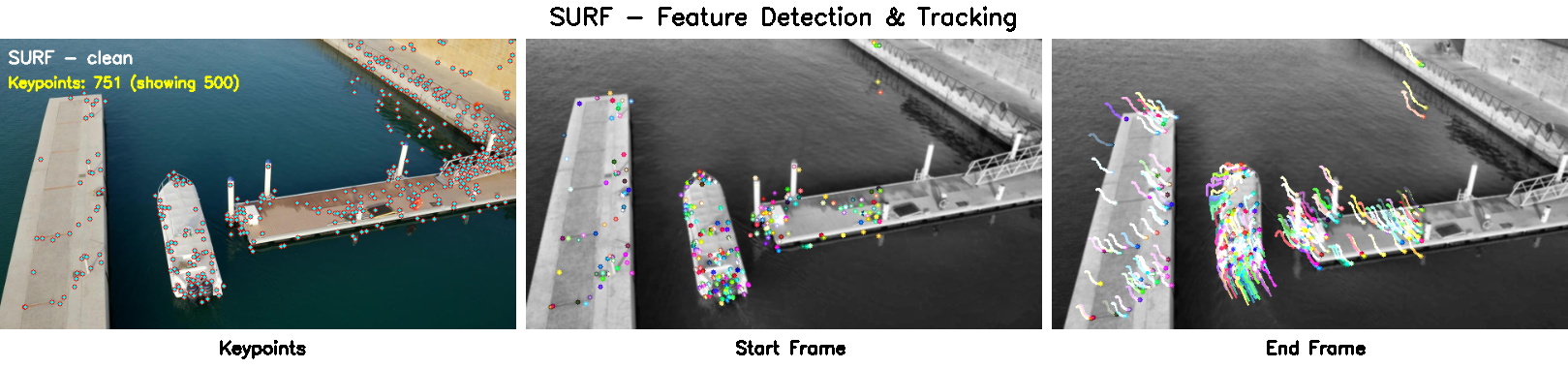
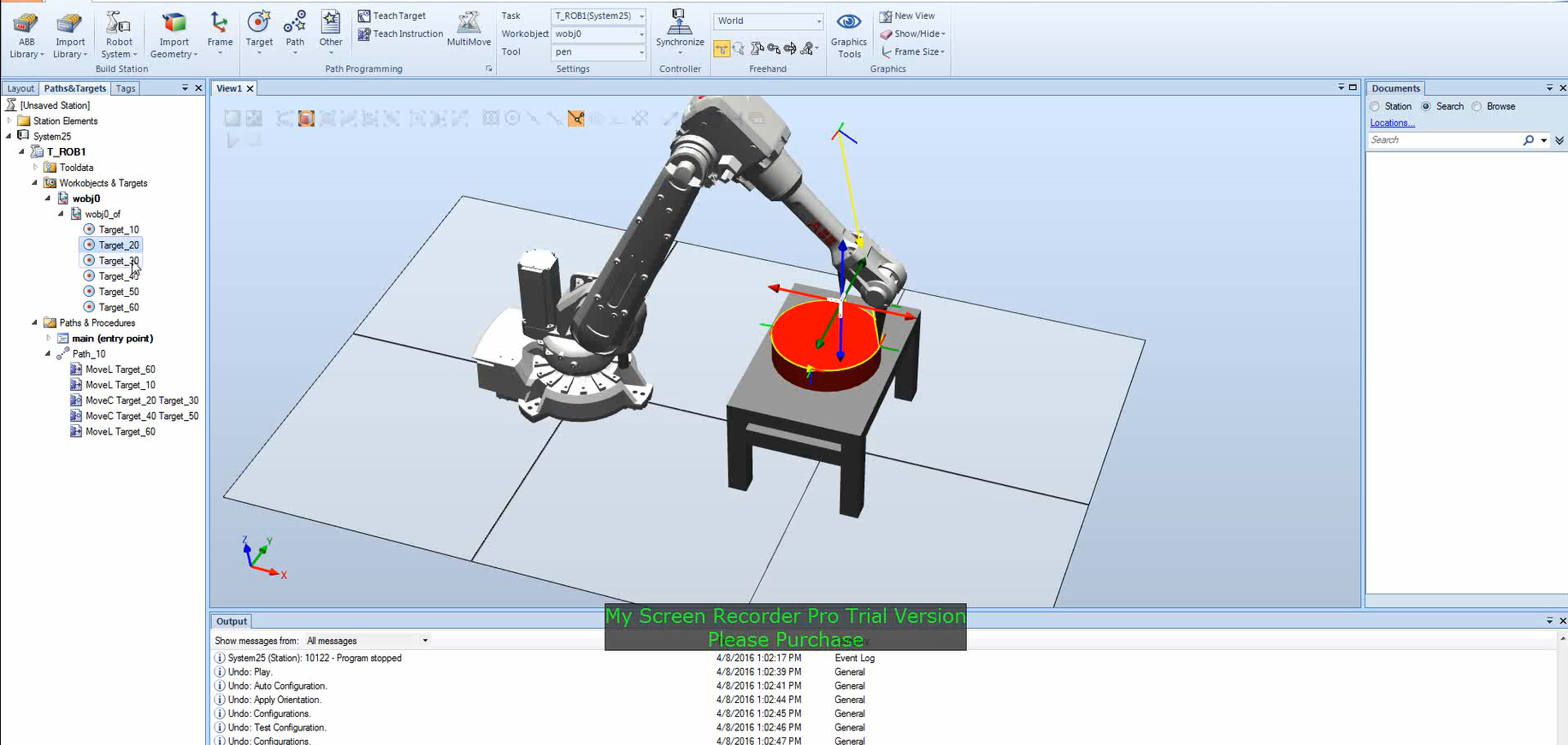
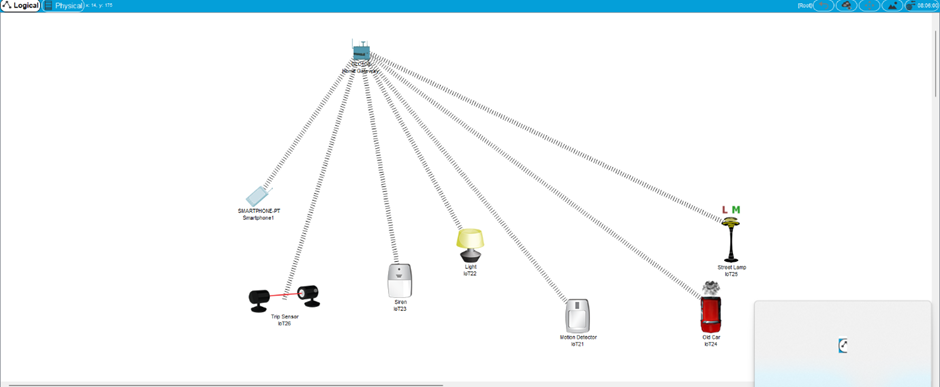
Hi! I'm passionate about automating everyday tasks through robotic systems. I specialize in ROS simulations, mobile robots, industrial automation, system integration, and computer vision. I love leading teams to build solutions that think smart, not hard—transforming manual processes into automated solutions. I'm always growing and learning, and I enjoy helping my teammates and those around me grow through building things together.
Tech Stack: ROS 1/2 Autonomous Navigation Robotic Perception Motion Control PLC Programming Docker Linux C++ MATLAB Gazebo Simulation FMS