01 Project Overview
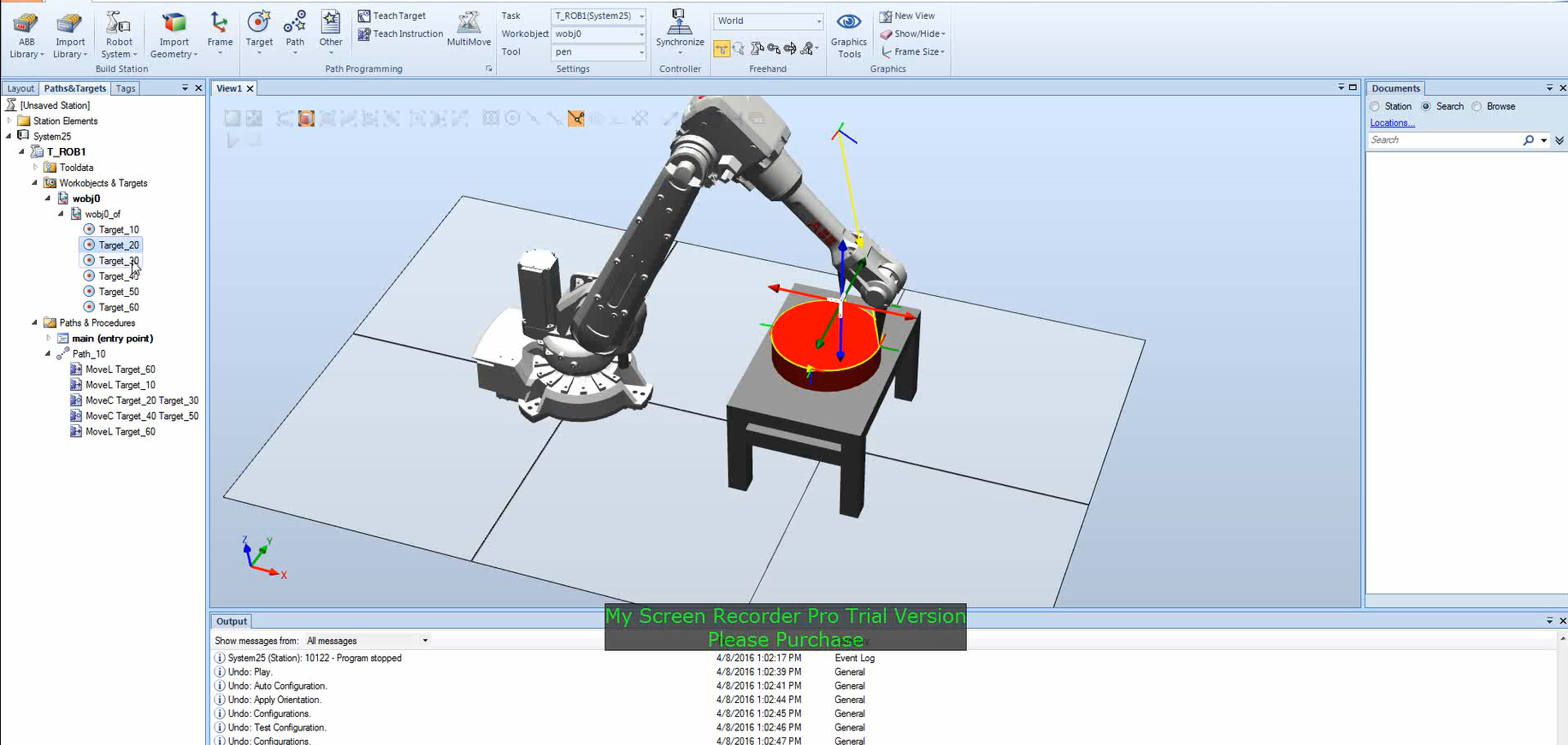
Programmed ABB industrial robots using RobotStudio simulation environment. Built custom end-effector trajectory planning and complete welding workcell projects, demonstrating RAPID programming, workcell design, and path optimization for manufacturing applications.
02 Key Features & Achievements
Custom end-effector trajectory planning with multi-waypoint paths
Complete welding workcell with programmed weld paths
RAPID programming with motion commands (MoveL, MoveC, MoveJ)
Simulation-based verification with collision detection
Path optimization using zone-based motion for efficient manufacturing
03 Technical Stack
04 Challenges & Solutions
Challenge 1
Target Not Reachable
Solution
Learned that robots have multiple joint configurations for the same position. Manually adjusted robot configuration in RobotStudio to use alternative solutions that satisfied joint limits, implementing systematic configuration checking for all targets.
Challenge 2
Collision Path Through Workpiece
Solution
Added intermediate waypoints to avoid obstacles and used RobotStudio's collision detection to identify problematic paths. Switched to joint motion (MoveJ) for non-critical segments where straight-line precision wasn't required.
Challenge 3
Poor Weld Quality from Jerky Motion
Solution
Switched from 'fine' precision to zone-based motion (z5, z10) for welding segments, allowing smooth continuous motion. Used 'fine' precision only at critical start/end points, creating professional-quality continuous welds.
Challenge 4
TCP Calibration Error
Solution
Recalibrated Tool Center Point using 4-point method, teaching robot to same point from four different orientations. Updated tool definition and verified with test movements before programming full trajectories.
05 Key Achievements
Programmed complex multi-waypoint trajectories with sub-millimeter positioning accuracy
Created complete welding workcell with continuous weld paths for manufacturing applications
Mastered RAPID programming language for industrial robot automation
Verified all paths through simulation before hardware deployment, ensuring safety and efficiency