
Project Gallery

01 Project Overview
WALRUS (Wireless Autonomous Land Recon Utility Service) is an autonomous unmanned ground vehicle designed for defense applications, inspired by the Indian Army Defense Compendium's requirements for supporting soldiers in rough, unstructured terrains. As Robotics Head at RUGVED Systems, I led the development of the complete navigation system, including 3D navigation for unstructured environments using camera-based sensors (due to 3D LIDAR budget constraints), GPS-denied navigation and tracking, drone integration capabilities, and modular payload systems. The project involved mechanical design, electronics integration, and software development over a two-year period.
02 Key Features & Achievements
Gmapping SLAM, A* global planning, DWA local planning
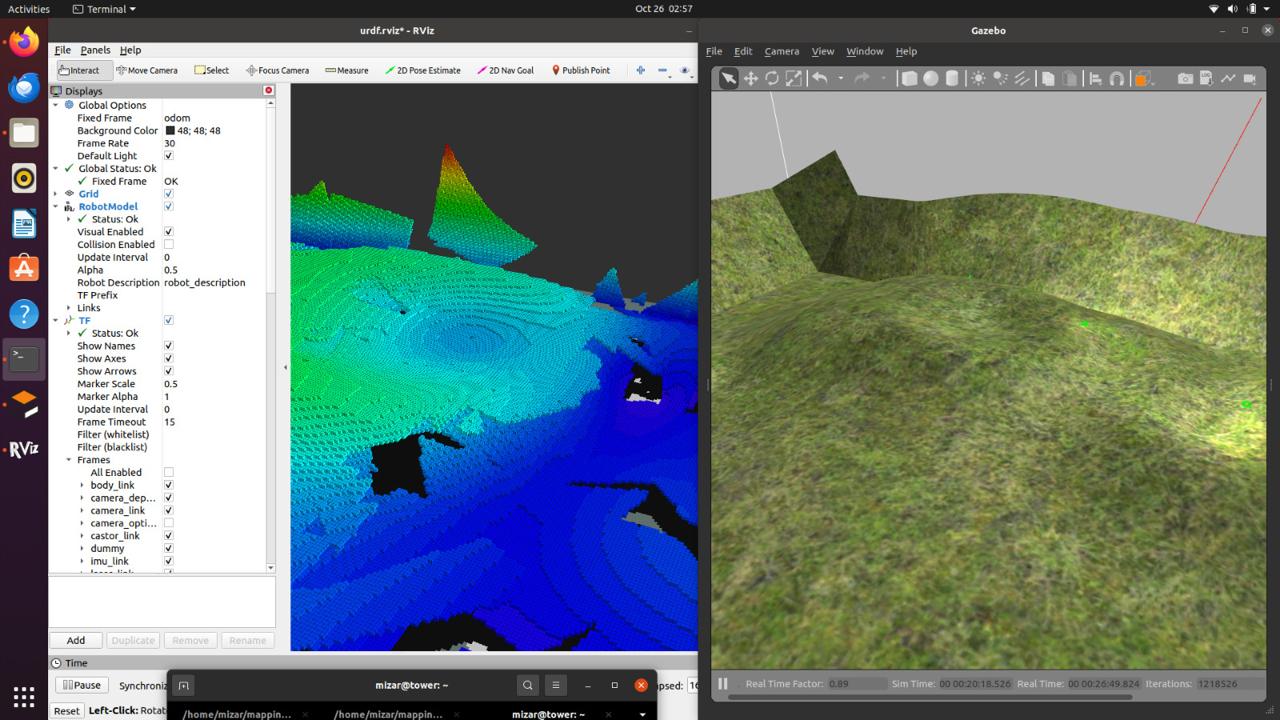
Camera-based depth estimation for unstructured terrain (cost-effective alternative to 3D LIDAR)
Visual SLAM and sensor fusion for operation without GPS
Landing platform for multi-platform missions
Flexible compartments for medical supplies, ammunition, equipment
LIDAR (A2), IMU, encoders, stereo cameras integrated with ROS 2
03 Technical Stack
04 Challenges & Solutions
System integration and optimization
Through systematic problem-solving and iterative development, we addressed these challenges by implementing robust algorithms, optimizing system architecture, and conducting extensive testing to ensure reliability and performance.
05 Key Achievements
3D navigation system operational for unstructured terrain using cost-effective camera sensors
GPS-denied navigation and tracking systems functional for defense scenarios
Navigation system completed with ~90% localization accuracy
SLAM, path planning, and obstacle avoidance fully operational