01 Project Overview
Complete ROS-based autonomous navigation system for two-wheeled differential drive robot. Integrates SLAM using Gmapping, localization using AMCL, path planning with move_base and DWA Planner, and custom control algorithms. Achieved 95% localization accuracy in indoor environments. Shows understanding of probabilistic robotics, sensor fusion, and autonomous systems.
02 Key Features & Achievements
Complete ROS navigation stack integrating SLAM, localization, path planning, and control
Gmapping-based SLAM with tuned parameters for differential drive kinematics
AMCL particle filter localization achieving 95% accuracy with adaptive particle management
Global planning (A*) and local planning (DWA Planner) with configurable costmaps
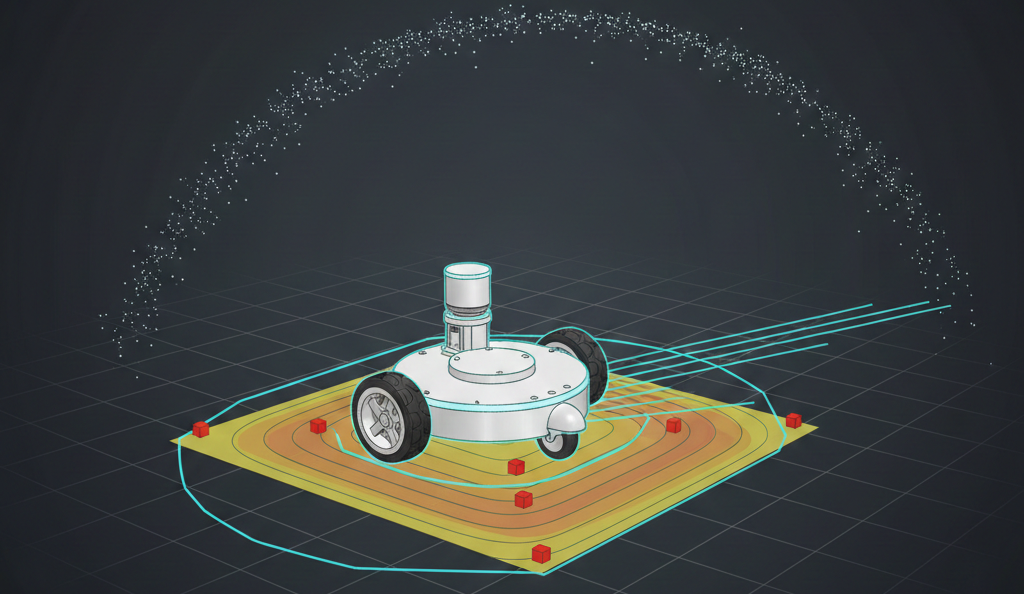
Complete URDF robot model (M2WR) with LIDAR, IMU, and differential drive configuration
Custom PID controller for wall-centering behavior demonstrating sensor-based control
Sensor fusion implementation with IMU-to-odometry conversion and LIDAR processing
03 Technical Stack
04 Challenges & Solutions
Challenge 1
Coordinate frame confusion causing robot to think it was in wrong locations due to incorrect TF transformations
Solution
Carefully verified every TF relationship using RViz visualization, ensuring LIDAR frame properly linked to base frame
Challenge 2
Extensive parameter tuning required across motion models, sensor models, planners, and costmaps with countless parameters
Solution
Changed one parameter at a time, maintained log of changes and effects, focused on high-impact parameters first
Challenge 3
Computational bottlenecks from running SLAM, AMCL, path planning, and control simultaneously on limited hardware
Solution
Adjusted update frequencies—global planning runs less frequently than local planning, reduced particle counts when needed
Challenge 4
Localization failures when robot lost track due to sensor failures or unexpected movement
Solution
Used AMCL's adaptive particle filter for recovery, implemented recovery behaviors as fallbacks, provided better initial pose estimates
05 Key Achievements
Achieved robust pose estimation using AMCL with tuned parameters
Successfully integrated SLAM, localization, and path planning into cohesive system
System operates in real-time with appropriate update frequencies for all components
Full system validated in Gazebo before hardware deployment
06 Key Takeaways
Systems Integration Complexity: Navigation isn't a single algorithm—it's a system of interconnected components
Understanding how SLAM, localization, planning, and control interact is essential
Changes to one component affect others, requiring holistic understanding
Parameter Tuning Importance: Default parameters rarely work well