
Project Gallery



01 Project Overview
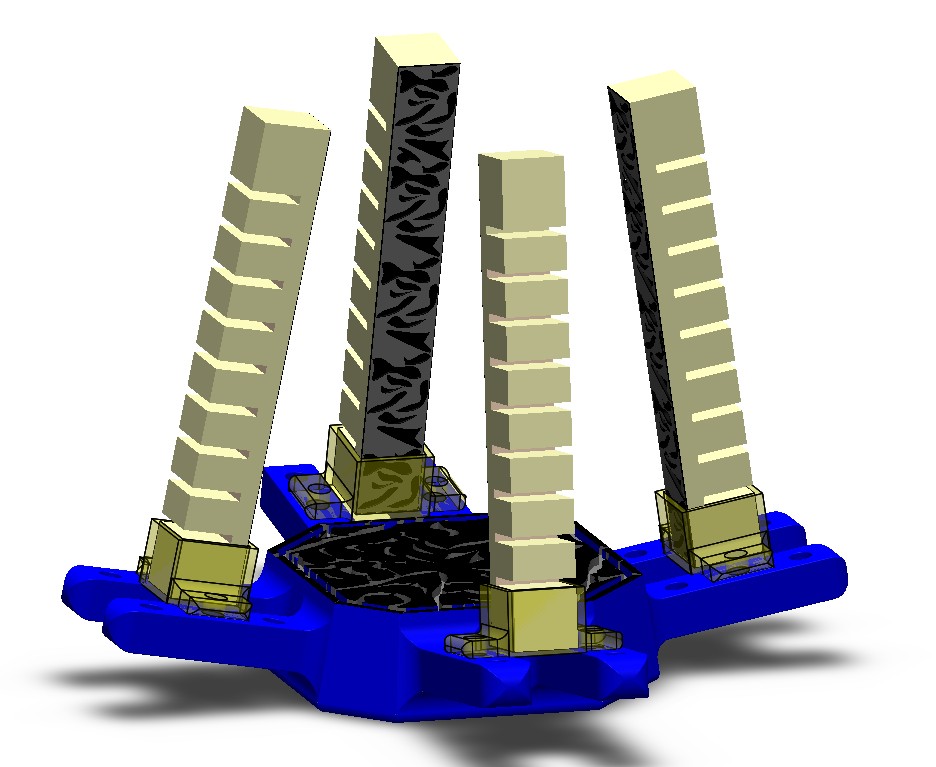
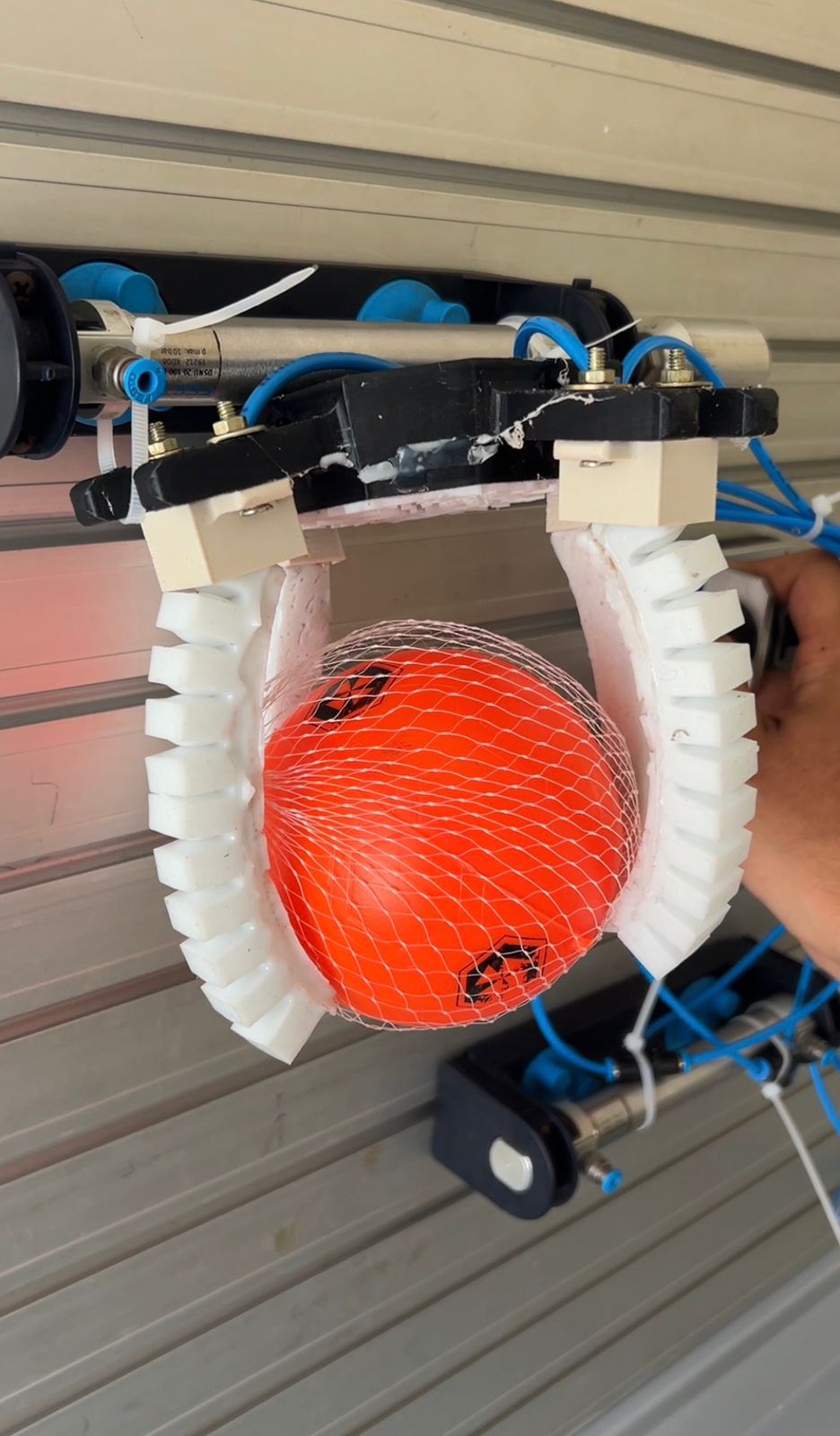
Pneumatically actuated soft robotic gripper for handling delicate objects. Uses custom palm design for Universal Robots cobot integration and Ecoflex 10 silicone with >900% elongation. Achieves 151mm deformation at 40 kPa, enabling wrapping around 5-17cm objects. ANSYS FEA validated design with <6% error. Shows how compliant materials enable manipulation capabilities beyond rigid systems.
02 Key Features & Achievements
Multi-finger pneumatic gripper with internal air channels for controlled deformation
Custom palm design for cobot integration and enhanced grip stability
Ecoflex 10 silicone material with >900% elongation for delicate object handling
ANSYS FEA simulation with <6% prediction error across 5-50 kPa range
151mm maximum deformation enabling wrapping around 5-17cm objects
Validated fabrication process with systematic quality control
Industrial cobot integration demonstrating real-world deployment
03 Technical Stack
04 Challenges & Solutions
Challenge 1
Air bubbles in castings created holes in finger walls, compromising pneumatic channels
Solution
Extended vacuum degassing to 15+ minutes and switched to gentle folding mixing technique
Challenge 2
Mold misalignment caused air leaks at seams, preventing proper actuation
Solution
Added alignment pins to molds and implemented visual verification before casting
Challenge 3
Blocked internal air chambers from dimensional errors in mold design
Solution
Conducted CAD cross-sectional analysis and used transparent test molds to verify channels
Challenge 4
Balancing material compliance with structural integrity for large deformations
Solution
Selected Ecoflex 10 silicone and used ANSYS FEA to validate 21.2× safety factor
05 Key Achievements
151.07 mm maximum deformation at 40 kPa, enabling effective wrapping around objects 5-17cm diameter
Material safety factor of 21.2× with maximum strain of 42.54% (well below 900% material limit)