Project Gallery
01 Project Overview
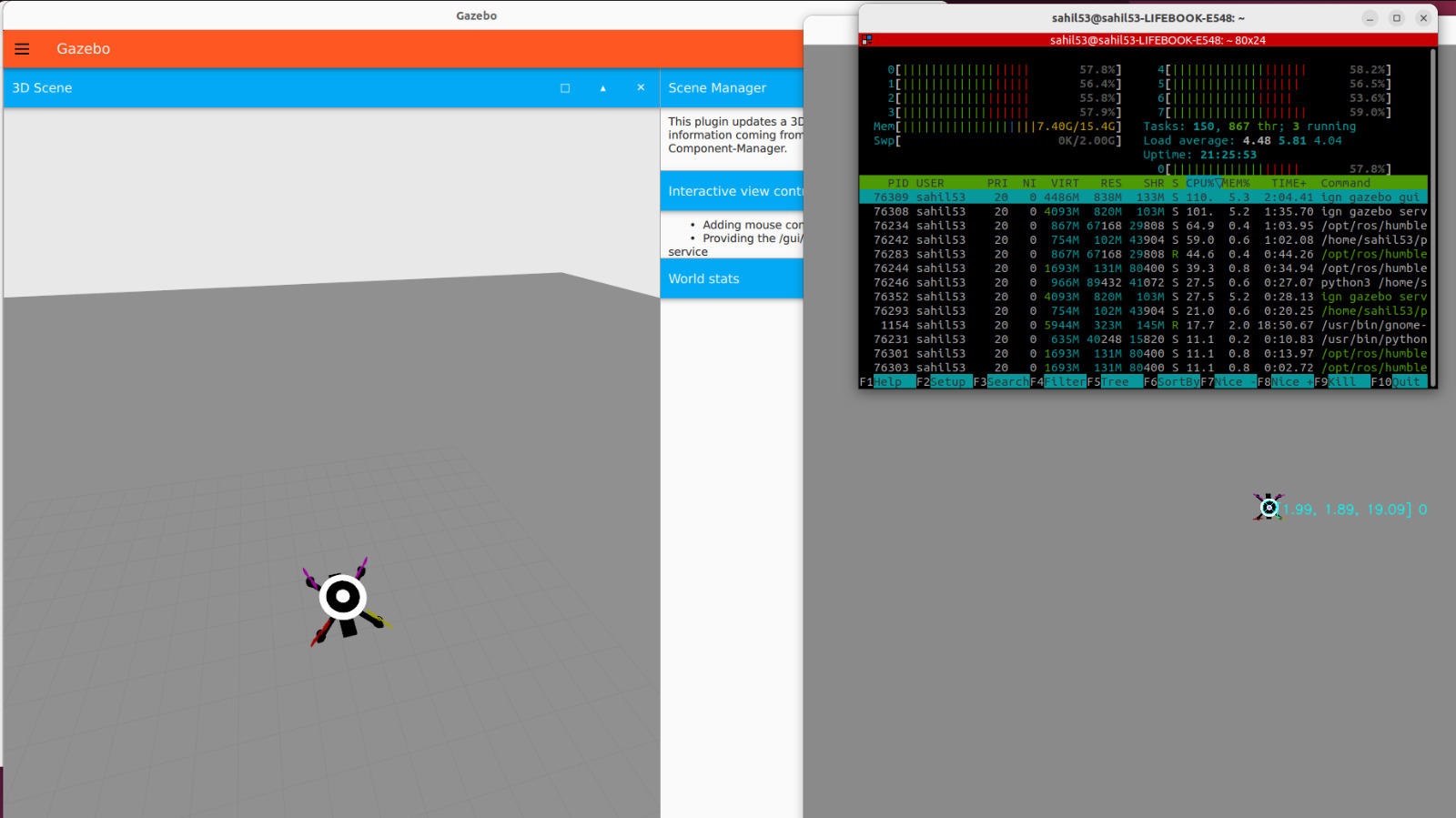
Built an autonomous stabilization system for a custom Pico drone using PID control and WhyCon marker tracking. The system achieves stable hover at setpoint [2, 2, 19] within 8.5 seconds, maintaining ±0.5 units accuracy even under disturbances. This demonstrates that classic control theory, when properly tuned and combined with intelligent signal processing, can deliver precise autonomous flight without requiring neural networks or expensive hardware.
Award Recognition
This project was awarded as best paper in the International Conference on Automation and Machine Learning using Robots and Artificial Intelligence Methods (AMLURAIM) on 12th–13th February 2025, organized by the Department of Mechanical Engineering, National Institute of Technology, Rourkela.
02 Key Features & Achievements
Designed custom Pico drone CAD model, implemented full ROS 2 control system, and developed real-time tuning interface
Implemented 2nd-order Butterworth low-pass filter that transformed unstable system into smooth, stable flight
Custom GUI for live parameter adjustment eliminated need for hundreds of simulation restarts, reducing tuning time from days to hours
Achieved ±0.5 units accuracy on all axes demonstrating robust PID control implementation
ROS 2-based design enables independent development and testing of components before integration
03 Technical Stack
04 Challenges & Solutions
Challenge 1
High-Frequency Noise in Vision-Based Tracking: The WhyCon marker tracking system provided position estimates with significant high-frequency noise, causing oscillations and instability in the PID control system. Initial attempts to tune PID parameters failed because the noise was being amplified by the control loop.
Solution
Implemented a 2nd-order Butterworth low-pass filter with a cutoff frequency of 0.5 Hz. This filter eliminated the high-frequency noise while preserving the actual position signal. The filtered signal enabled the PID controllers to function properly, transforming an oscillating, unstable system into smooth, stable flight. This was the critical breakthrough that made the entire system work.
Challenge 2
PID Parameter Tuning Complexity: Tuning three separate PID controllers (throttle, roll, pitch) with multiple parameters each required extensive iterative testing. Traditional approach of modifying parameters, restarting simulation, and observing results was extremely time-consuming.
Solution
Developed a custom real-time PID tuning GUI that allows parameter adjustment during active flight simulation. This eliminated the need for hundreds of simulation restarts, dramatically accelerating the tuning process from days to hours. The GUI provides immediate visual feedback on parameter changes, enabling intuitive understanding of how each parameter affects system behavior.
05 Key Achievements
8.5 seconds to reach setpoint [2, 2, 19] (15% faster than 10s target)
±0.5 units maintained on all three axes (x, y, z) once stabilized
System recovers stability within 5-7 seconds after sudden disturbances
PID controller runs at 100 Hz for responsive real-time control
06 Key Takeaways
This project provided deep understanding of control theory, signal processing, and real-time systems
I learned how to systematically tune PID controllers for multi-axis control
The project taught me the importance of signal filtering in vision-based systems
The low-pass filter was the breakthrough that enabled stable flight