Project Gallery
01 Project Overview
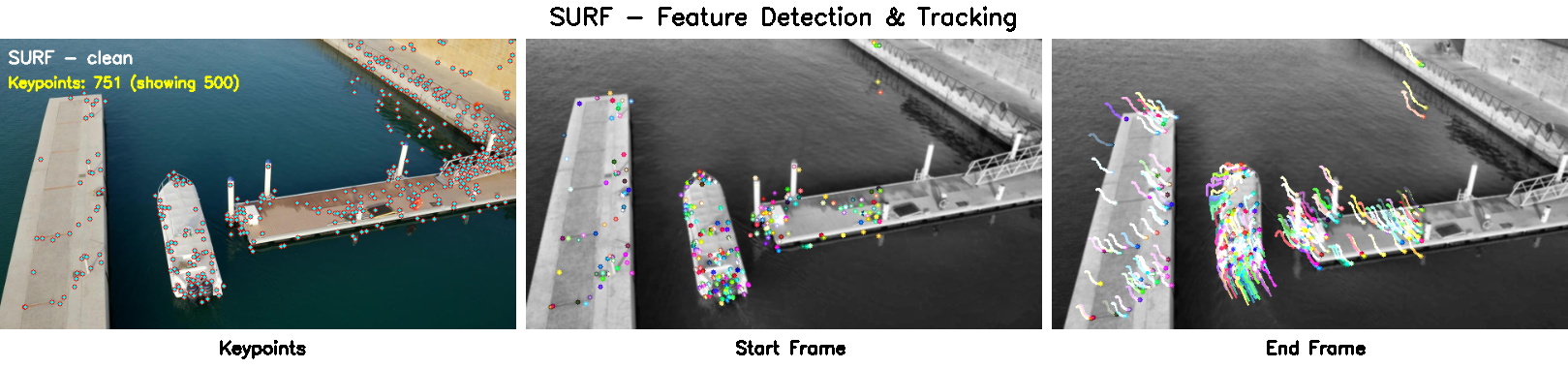
Comprehensive evaluation of feature detection algorithms for Image-Based Visual Servoing (IBVS) applications using UAV imagery. Compares SIFT, SURF, ORB, Harris, FAST, and Canny edge detection with Lucas-Kanade optical flow tracking, evaluating performance under realistic conditions for vision-guided robotic control. The system provides the foundation for IBVS control, where visual feedback directly drives robot motion without requiring 3D world models.
02 Key Features & Achievements
Six feature detection algorithms: SIFT, SURF, ORB, Harris Corner, FAST, Canny Edges
Lucas-Kanade optical flow tracking with multi-scale pyramid levels for reliable feature tracking
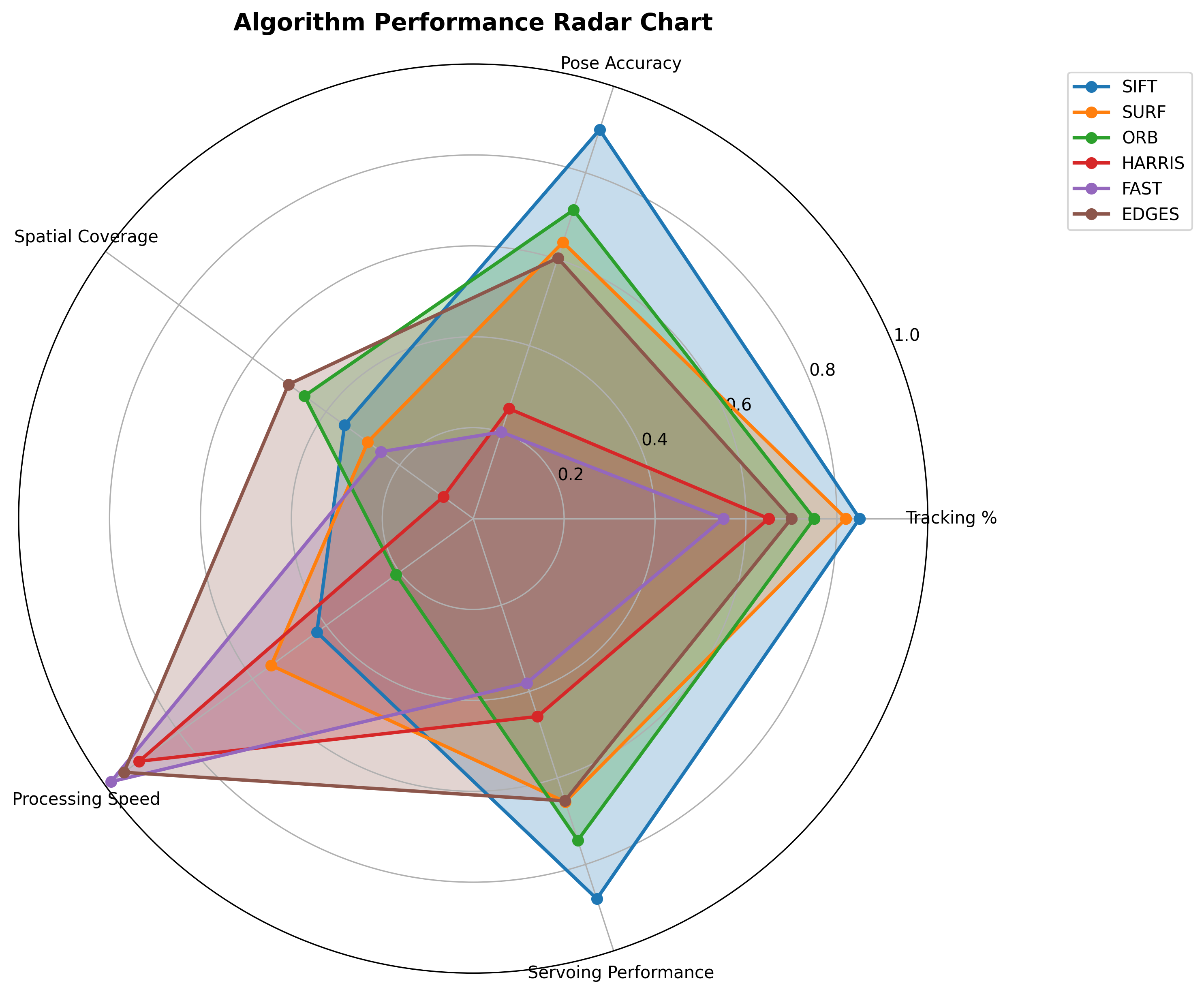
Comprehensive evaluation metrics: Feature count, processing time, tracking stability, spatial coverage, IBVS performance
Testing framework: Gaussian noise (σ=10, σ=25), blur (5×5, 11×11 kernels), brightness variations (±30)
Real-time visualization: Keypoint overlays, tracking videos, performance charts
UAV dataset processing: 301 frames from UAV123_10fps Boat1 sequence
IBVS performance scoring: Composite metrics combining tracking stability, spatial coverage, control stability, and pose estimation accuracy
03 Technical Stack
04 Challenges & Solutions
Evaluating feature detection algorithms for IBVS applications under realistic UAV conditions including noise, blur, and brightness variations
The project required comprehensive evaluation of multiple feature detection algorithms to determine optimal performance for Image-Based Visual Servoing applications. Challenges included maintaining feature stability under adverse conditions, achieving real-time processing speeds, and ensuring robust tracking performance for vision-guided robotic control.
05 Key Achievements
SIFT achieved 88% IBVS performance with 85% tracking stability under adverse conditions
ORB achieved 74.4% IBVS performance with balanced speed and accuracy
SURF achieved 65.5% IBVS performance as faster alternative to SIFT
90% pose estimation accuracy achieved with SIFT algorithm