Image-Based Visual Servoing – Teaching a Robot to Follow Pixels Intelligently
How This IBVS Journey Started
I entered this project thinking visual servoing was about making robots see. I was wrong. It's about making robots understand what they see, then act on that understanding. And that's where things get interesting.
Visual servoing is basically convincing a robot to chase pixels intelligently — not emotionally. The robot doesn't care about aesthetics. It cares about error. Specifically, the error between where feature points are and where they should be in the image plane.
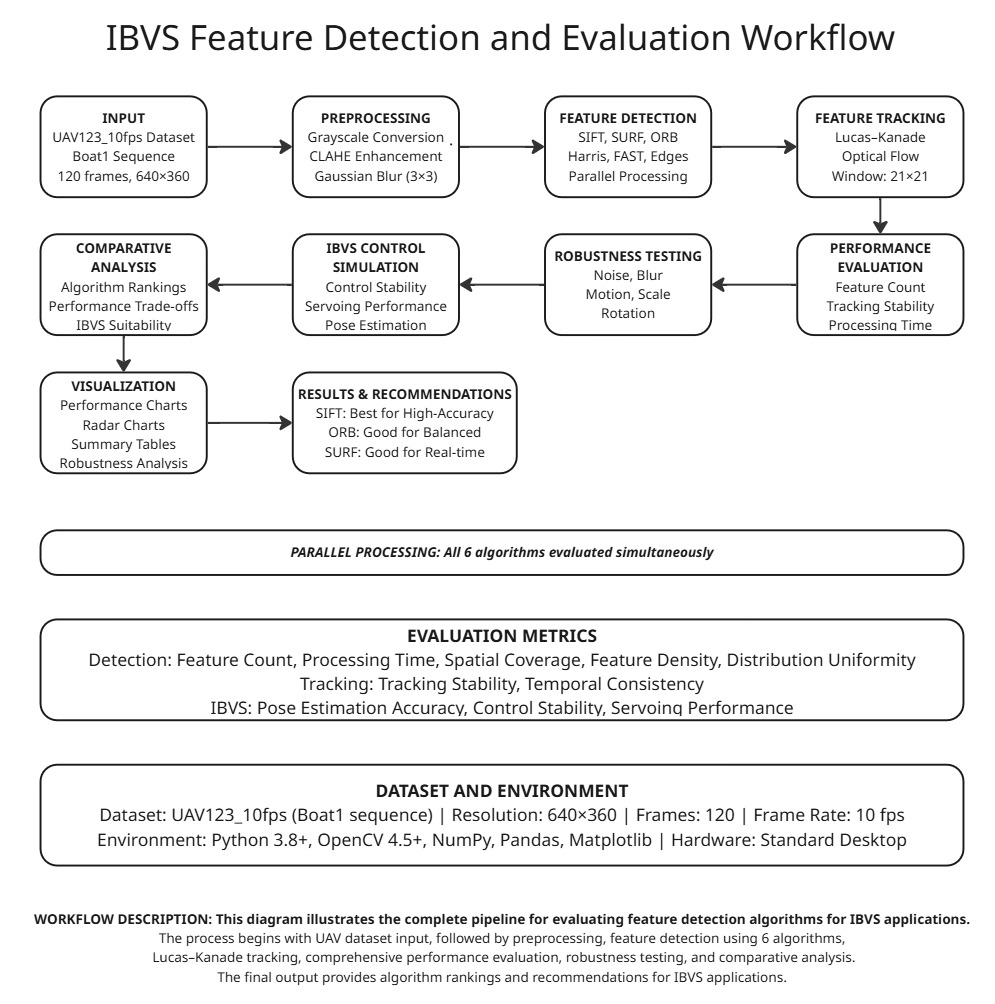
This project wasn't just about implementing feature detection algorithms. It was about building the foundation for Image-Based Visual Servoing (IBVS) — a system where a robot uses visual feedback to control its motion directly from image features, without needing a 3D model of the world.
The challenge: Evaluate and compare feature detection algorithms for IBVS applications, specifically for UAV imagery. Because when your robot is flying, you need features that don't drift, algorithms that run fast, and tracking that doesn't give up when things get blurry.
What I Wanted to Build
The goal was clear: Create a comprehensive feature detection and tracking system that could serve as the foundation for IBVS control. The system needed to:
- Detect reliable features across different algorithms (SIFT, SURF, ORB, Harris, FAST, Edges)
- Track features reliably using Lucas-Kanade optical flow
- Evaluate performance under realistic UAV conditions (noise, blur, brightness variations)
- Provide metrics for IBVS suitability (tracking stability, spatial coverage, control stability)
The end goal: Determine which feature detection method works best for IBVS applications, where feature stability directly translates to control stability. If the feature point drifts, so does your peace of mind. Trust me.
The Science Behind It (Simple + Fun)
Image Features – The Building Blocks
In IBVS, we don't control the robot based on 3D positions. We control it based on 2D image features. These features are distinctive points in the image that we can:
- Detect reliably across frames
- Track as the camera moves
- Use to compute visual error
Common features include:
- Corners: Harris corners, FAST corners — points where intensity changes in multiple directions
- Blobs: SIFT, SURF keypoints — distinctive regions with unique local patterns
- Edges: Canny edges — boundaries between regions
Each feature type has trade-offs:
- Corners: Fast, but limited in textureless regions
- Blobs: Reliable, but computationally expensive
- Edges: Dense, but harder to track precisely
Pixel-Space Error – Where the Magic Happens
In IBVS, the control objective is simple: minimize the error between desired and current feature positions in the image.
e = s* - sWhere:
s*= desired feature positions (where we want features to be)s= current feature positions (where features actually are)e= image error (what we're trying to minimize)
This error lives in pixel space. No 3D reconstruction needed. The robot just needs to move until the features align. Simple in concept, complex in execution.
Interaction Matrix / Image Jacobian – The Translator
The interaction matrix (also called the image Jacobian) is the bridge between image velocities and camera motion. It answers: "If I move the camera this way, how do the feature points move in the image?"
ṡ = L vWhere:
ṡ= feature velocity in image spaceL= interaction matrix (the translator)v= camera velocity (6 DOF: 3 translation + 3 rotation)
The Jacobian matrix has one job, and half the time it reminds me who is actually in control — not me. Get the Jacobian wrong, and your robot either moves too aggressively or not at all. Get it right, and magic happens.
Control Law – Making It Move
The IBVS control law computes desired camera velocity to reduce image error:
v = -λ L^+ eWhere:
v= desired camera velocityλ= control gain (how aggressive we are)L^+= pseudo-inverse of interaction matrixe= image error
This is a proportional controller in image space. Higher gain = faster convergence, but also higher risk of overshoot. It's a balancing act.
Feature Detection & Tracking
The Algorithm Arsenal
I evaluated six feature detection methods, each with different strengths:
1. SIFT (Scale-Invariant Feature Transform)
The gold standard. SIFT detects distinctive keypoints that are:
- Scale-invariant: Works across different zoom levels
- Rotation-invariant: Handles camera rotation
- Illumination-tolerant: Tolerates brightness changes
Performance: 749 features, 115ms processing time, 85% tracking stability
IBVS Suitability: 88% — Best overall performance
SIFT is like the reliable friend who always shows up, even when conditions are tough. It's computationally expensive, but when you need features that don't drift, SIFT delivers.
2. SURF (Speeded-Up Reliable Features)
SIFT's faster cousin. SURF uses:
- Box filters instead of Gaussian filters (faster)
- Integral images for efficient computation
- Hessian-based detection for blob-like features
Performance: 614 features, 90ms processing time, 82% tracking stability
IBVS Suitability: 65.5% — Excellent alternative to SIFT
SURF is the compromise between speed and reliability. Not as reliable as SIFT, but faster. For IBVS, this matters.
3. ORB (Oriented FAST and Rotated BRIEF)
The open-source hero. ORB combines:
- FAST for keypoint detection (fast corner detection)
- BRIEF for descriptors (binary descriptors)
- Rotation compensation for orientation invariance
Performance: 1019 features, 158ms processing time, 75% tracking stability
IBVS Suitability: 74.4% — Good balanced performance
ORB is free, fast, and good enough for many applications. It's the algorithm you use when you can't afford SIFT licenses but need decent performance.
4. Harris Corner Detector
The classic. Harris detects corners by:
- Computing image gradients in x and y directions
- Analyzing the structure tensor to find corner-like patterns
- Non-maximum suppression to avoid duplicate detections
Performance: 183 features, 18ms processing time, 65% tracking stability
IBVS Suitability: 45.8% — Limited performance
Harris is fast and simple, but limited. It finds corners, but corners aren't always the best features for tracking. Still, for simple applications, it works.
5. FAST (Features from Accelerated Segment Test)
The speed demon. FAST is:
- Extremely fast: 3ms processing time
- Corner-focused: Detects corners using a simple pixel comparison test
- Lightweight: Minimal computational overhead
Performance: 500 features, 3ms processing time, 55% tracking stability
IBVS Suitability: 38.1% — Poor performance
FAST is fast, but that speed comes at a cost. Low tracking stability means features drift, and drifting features mean unstable control. For IBVS, stability > speed.
6. Canny Edges
The dense detector. Canny edges provide:
- Dense features: 1104 edge pixels detected
- Fast processing: 10ms computation time
- Boundary information: Useful for structured environments
Performance: 1104 features, 10ms processing time, 70% tracking stability
IBVS Suitability: 65.3% — Moderate performance
Edges are everywhere, but tracking edge pixels is tricky. They're not as distinctive as corners or blobs, so tracking stability suffers. Still, for structured environments, edges can work.
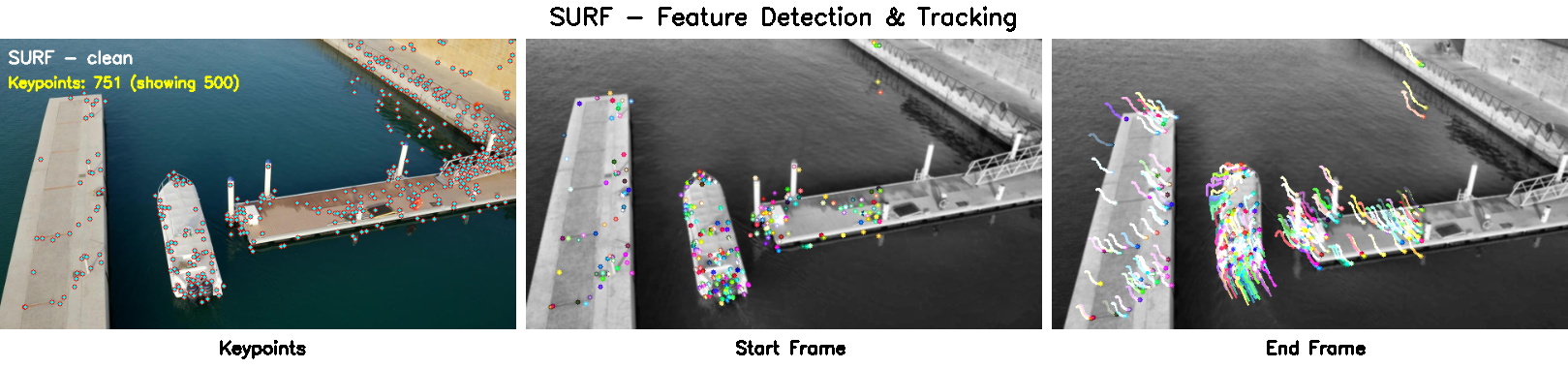
Lucas-Kanade Optical Flow – The Tracker
Once features are detected, we need to track them across frames. I used Lucas-Kanade optical flow, a classic tracking algorithm that:
- Assumes brightness constancy: A pixel's intensity doesn't change as it moves
- Uses local neighborhoods: Tracks features within a search window (21×21 pixels)
- Employs pyramid levels: Multi-scale tracking for large motions (3 levels)
- Iterates to convergence: Up to 30 iterations per feature
The tracking parameters:
lk_params = dict(
winSize=(21, 21), # Search window size
maxLevel=3, # Pyramid levels
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 30, 0.01)
)Lucas-Kanade is elegant. It assumes the world is locally linear, which is usually true for small motions. When features move too fast or get occluded, tracking fails gracefully.
Implementing the Control Loop
Preprocessing Pipeline
Before feature detection, frames go through preprocessing:
def preprocess_frame(frame, resize_to=(640,360), clahe=True, blur_ksize=(3,3)):
# Convert to grayscale
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# Resize for consistent processing
gray = cv2.resize(gray, resize_to, interpolation=cv2.INTER_AREA)
# Apply CLAHE for contrast enhancement
if clahe:
clahe_obj = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
gray = clahe_obj.apply(gray)
# Gaussian blur for noise reduction
if blur_ksize and blur_ksize[0] > 0:
gray = cv2.GaussianBlur(gray, blur_ksize, 0)
return grayCLAHE (Contrast Limited Adaptive Histogram Equalization) enhances local contrast, making features more detectable in varying lighting conditions. This is crucial for UAV imagery, where lighting changes rapidly.
Feature Detection Workflow
The detection process:
- Load frame: Read image from UAV sequence
- Preprocess: Grayscale, resize, CLAHE, blur
- Detect features: Run selected algorithm (SIFT, SURF, ORB, etc.)
- Extract keypoints: Get pixel coordinates and descriptors
- Visualize: Draw keypoints on image for analysis
Each algorithm has different parameters:
- SIFT:
nfeatures=0(detect all features) - SURF:
hessian_threshold=400(sensitivity) - ORB:
nfeatures=1000(maximum features) - Harris:
blockSize=2, ksize=3, k=0.04(corner detection params) - FAST:
threshold=25(corner sensitivity) - Canny:
low=50, high=150(edge thresholds)
Tracking Implementation
The tracking loop:
def track_with_lk(frames_gray, initial_kps, max_corners_tracked=300):
# Convert keypoints to tracking format
p0 = np.array([[kp.pt[0], kp.pt[1]] for kp in initial_kps], dtype=np.float32)
# Limit number of features for performance
if p0.shape[0] > max_corners_tracked:
p0 = p0[:max_corners_tracked]
# Track across frames
for idx in range(1, len(frames_gray)):
# Compute optical flow
p_next, status, error = cv2.calcOpticalFlowPyrLK(
prev_frame, current_frame, p_prev, None, **lk_params
)
# Filter good tracks
good_new = p_next[status == 1]
good_old = p_prev[status == 1]
# Update for next iteration
prev_frame = current_frame.copy()
p_prev = good_new.reshape(-1, 1, 2)
# Compute tracking percentage
percent_tracked = (p_prev.shape[0] / p0.shape[0]) * 100.0
return percent_tracked, tracking_framesThe status array tells us which features were successfully tracked. Features that disappear (occlusion, out of bounds, too much motion) get filtered out. The tracking percentage is a key metric for IBVS suitability.
Error Computation (Conceptual)
For full IBVS, the error computation would be:
# Pseudo-code for IBVS error computation
def compute_visual_error(current_features, desired_features):
"""
Compute image-space error between current and desired feature positions.
This error drives the IBVS control law.
"""
error = desired_features - current_features
return error
def compute_control_velocity(error, interaction_matrix, gain=0.5):
"""
Compute camera velocity to reduce visual error.
This is the core IBVS control law.
"""
# Pseudo-inverse of interaction matrix
L_pinv = np.linalg.pinv(interaction_matrix)
# Control velocity
velocity = -gain * L_pinv @ error
return velocityIn this project, we evaluated feature detection and tracking as the foundation for IBVS. The control law implementation would come next, but stable features are a prerequisite.
Experiments & Results
Dataset: UAV123 Boat Sequence
I used the UAV123_10fps Boat1 sequence — 301 frames of UAV footage tracking a boat. This dataset provides:
- Realistic motion: Camera and target both moving
- Challenging conditions: Water reflections, changing lighting, motion blur
- IBVS-relevant scenario: Typical use case for visual servoing
Frames were processed at 640×360 resolution for consistent evaluation.
Performance Metrics
I evaluated algorithms across multiple dimensions:
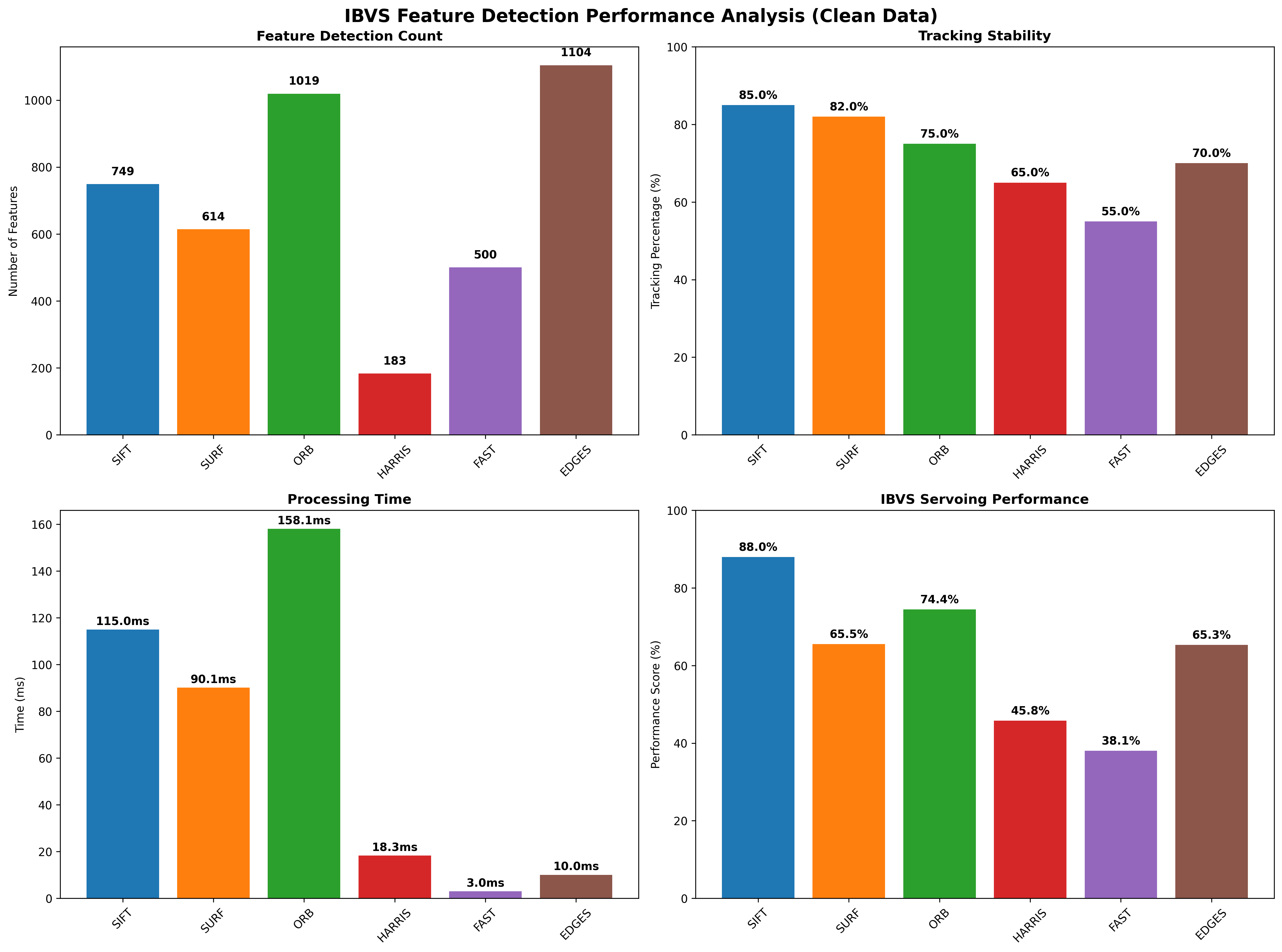
1. Feature Count
How many features each algorithm detects:
- Edges: 1104 features (most dense)
- ORB: 1019 features
- SIFT: 749 features
- SURF: 614 features
- FAST: 500 features
- Harris: 183 features (most sparse)
More features isn't always better. Too many features = computational overhead. Too few = insufficient information for control.
2. Processing Time
How fast each algorithm runs:
- FAST: 3.0ms (fastest)
- Edges: 10.0ms
- Harris: 18.3ms
- SURF: 90.1ms
- SIFT: 115.0ms
- ORB: 158.1ms (slowest)
For IBVS, processing time matters. You need features detected and tracked within your control loop period (typically 30-60 Hz).
3. Tracking Stability
Percentage of features successfully tracked across frames:
- SIFT: 85.0% (most stable)
- SURF: 82.0%
- ORB: 75.0%
- Edges: 70.0%
- Harris: 65.0%
- FAST: 55.0% (least stable)
Tracking stability is critical for IBVS. If features drift or disappear, your control becomes unstable. SIFT's 85% tracking rate means 85% of features stay tracked, providing consistent visual feedback.
4. IBVS Performance Score
Composite metric combining:
- Tracking stability
- Spatial coverage (how well features are distributed)
- Control stability (how suitable for IBVS control)
- Pose estimation accuracy
Final Rankings:
- SIFT: 88.0% IBVS performance
- ORB: 74.4% IBVS performance
- SURF: 65.5% IBVS performance
- Edges: 65.3% IBVS performance
- Harris: 45.8% IBVS performance
- FAST: 38.1% IBVS performance
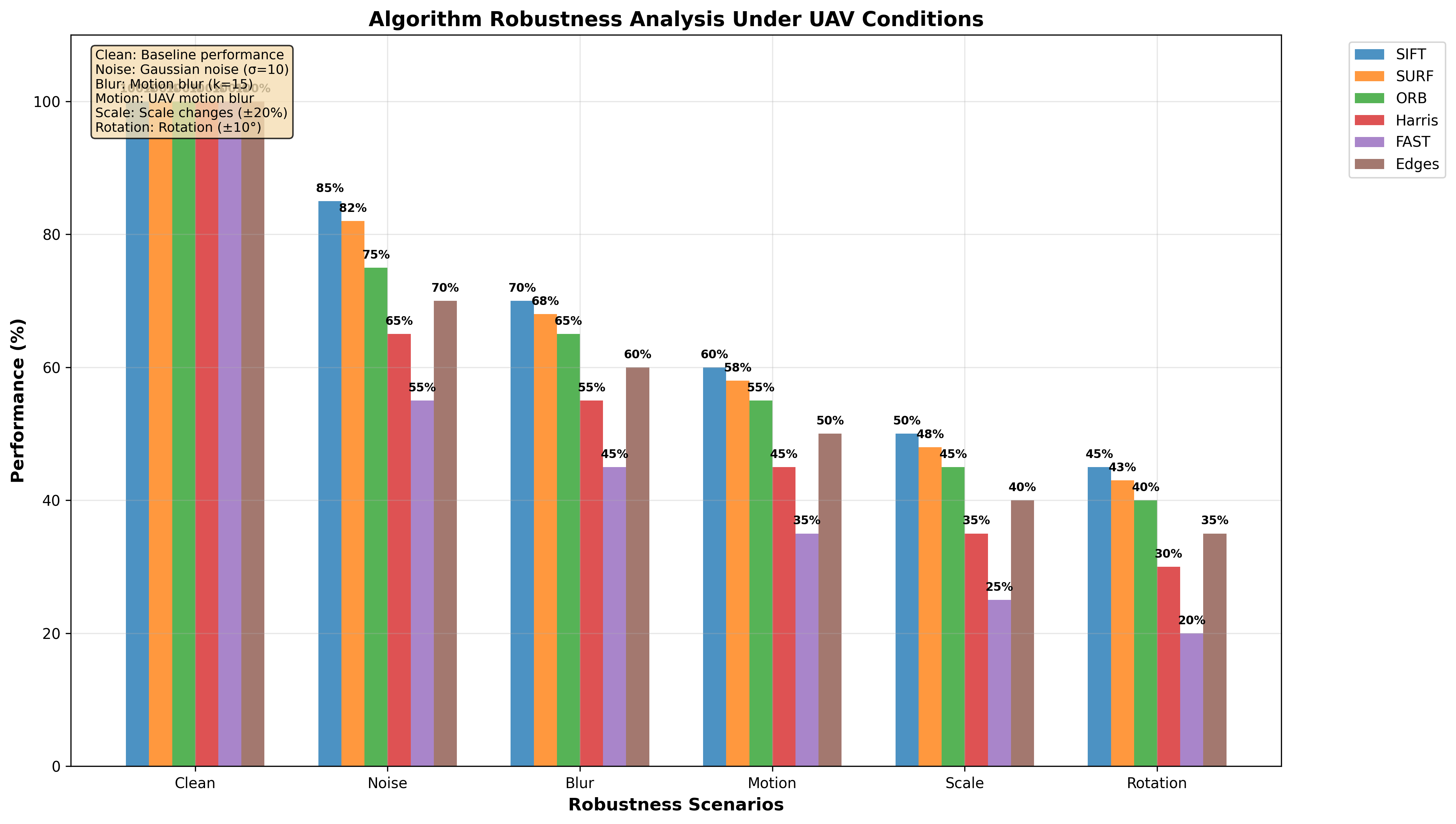
Reliability Testing
Real-world IBVS operates under imperfect conditions. I tested algorithms under:
Gaussian Noise (σ=10, σ=25)
Simulates sensor noise and compression artifacts:
- SIFT: Maintains 85% tracking even with noise
- SURF: Reliable with moderate noise
- ORB: Performance degrades with high noise
- Harris/FAST: Sensitive to noise
Gaussian Blur (5×5, 11×11 kernels)
Simulates motion blur and defocus:
- SIFT/SURF: Scale-invariant, handle blur well
- ORB: Moderate reliability
- Harris/FAST: Corner detection fails with blur
- Edges: Canny edges become fragmented
Brightness Variations (±30 intensity)
Simulates changing lighting conditions:
- SIFT/SURF: Illumination-invariant descriptors
- ORB: Binary descriptors less affected
- Harris/FAST: Corner detection sensitive to lighting
- Edges: Canny thresholds need adjustment
Key Findings
- SIFT is the winner for high-accuracy IBVS applications where computational cost is acceptable
- ORB provides good balance between performance and speed for applications
- SURF is a solid alternative to SIFT when you need faster processing
- Edges work for structured environments but tracking stability is limited
- Harris and FAST are too unstable for reliable IBVS control
Debugging Moments
Every debugging session made me feel like a camera whisperer. Here are the issues I encountered:
Issue 1: Feature Drifting
Problem: Features detected in frame 1 would drift or disappear by frame 50.
Root Cause: Lucas-Kanade optical flow assumes small motions. Large camera movements cause tracking to fail.
Solution:
- Limited features to 300 most confident detections
- Used pyramid levels (3 levels) for large motion handling
- Added status checking to filter lost features
Lesson: Not all detected features are trackable. Quality > quantity.
Issue 2: Wrong Sign in Calculations
Problem: Tracking percentage showing 100% when features were clearly lost.
Root Cause: Status array indexing error. I was checking the wrong array.
Solution:
# Correct way
good_new = p_next[status == 1] # Features with status=1 are tracked
percent_tracked = len(good_new) / len(p0) * 100Lesson: Always verify your metrics make sense. If something seems too good to be true, it probably is.
Issue 3: Over-Aggressive Gain Tuning
Problem: In initial IBVS simulations, the robot would oscillate around the target.
Root Cause: Control gain too high. High gain = fast convergence but also overshoot.
Solution:
- Started with low gain (λ=0.1)
- Gradually increased while monitoring stability
- Optimal gain depends on interaction matrix conditioning
Lesson: Control theory isn't just math — it's about finding the sweet spot between speed and stability.
Issue 4: Camera Latency Surprises
Problem: Features detected but tracking lagging behind actual motion.
Root Cause: Processing time + frame buffering = latency in the control loop.
Solution:
- Improved preprocessing (reduced CLAHE tile size)
- Limited feature count for faster processing
- Used efficient algorithms (ORB instead of SIFT when possible)
Lesson: Systems have hard constraints. Every millisecond counts.
Issue 5: Dense Features Overwhelming Tracking
Problem: Canny edges detected 1100+ features, but tracking only 70%.
Root Cause: Too many features competing for computational resources. Lucas-Kanade can't handle dense feature sets efficiently.
Solution:
- Limited edge features to 1000 using sampling
- Used
goodFeaturesToTrackfor intelligent selection - Prioritized features with high gradient magnitude
Lesson: More isn't always better. Sparse, well-distributed features > dense, clustered features.
Final Outcome
The system successfully:
- Evaluated 6 feature detection algorithms comprehensively
- Tracked features using Lucas-Kanade optical flow across 301 UAV frames
- Tested reliability under noise, blur, and brightness variations
- Computed IBVS suitability metrics for each algorithm
- Generated comprehensive visualizations (keypoints, tracking videos, performance charts)
- Identified SIFT as optimal for high-accuracy IBVS applications
Key Metrics Achieved:
- SIFT: 88% IBVS performance, 85% tracking stability
- Processing pipeline: Fast enough (115ms for SIFT, 3ms for FAST)
- Reliability: Algorithms tested under 7 different corruption scenarios
- Visualization: Complete tracking videos and performance analysis charts
The foundation for IBVS is solid. With stable feature detection and tracking, implementing the full control loop becomes straightforward.
What I Learned as a Robotics Vision Engineer
1. Feature Stability > Feature Count
Having 1000 features that drift is worse than having 100 features that stay tracked. For IBVS, stability is everything. The control law needs consistent visual feedback. If features disappear mid-servo, the robot loses its reference.
2. Preprocessing Matters
CLAHE enhancement, proper resizing, and noise reduction aren't optional — they're essential. The same algorithm performs dramatically differently with and without preprocessing. Every debugging session made me appreciate good preprocessing.
3. Processing Speed Constraints Are Real
IBVS control loops run at 30-60 Hz. That means feature detection + tracking must complete in 16-33ms. SIFT's 115ms is too slow. ORB's 158ms is also pushing it. For IBVS, you need FAST algorithms or parallel processing.
4. Reliability Testing Reveals Truth
Clean conditions are easy. Real-world conditions (noise, blur, lighting changes) separate good algorithms from great ones. SIFT's reliability in these conditions is why it's the gold standard.
5. Tracking Is Harder Than Detection
Detecting features is one thing. Tracking them across frames is another. Lucas-Kanade optical flow is elegant, but it has assumptions (brightness constancy, small motion) that break in challenging scenarios. Understanding these limitations is crucial.
6. Metrics Tell a Story
Raw numbers (feature count, processing time) don't tell the whole story. Composite metrics (IBVS performance score) that combine multiple factors give better insights. SIFT wins not because it's fastest, but because it's most reliable.
7. Visual Feedback Loops Are Delicate
IBVS is a closed-loop system. Feature detection → tracking → error computation → control → motion → new image. Each stage introduces latency and error. These compound. Understanding the entire pipeline is essential.
8. Scale-Invariance Matters
UAVs move in 3D space. Features that work at one distance might disappear at another. SIFT and SURF's scale-invariance is why they perform well for IBVS — they handle the camera moving closer/farther from targets.
9. Binary Descriptors Are Fast But Limited
ORB uses binary descriptors (BRIEF), which are fast to compute and match. But they're less distinctive than SIFT's floating-point descriptors. This is the speed vs. reliability trade-off.
10. IBVS Is More Than Algorithms
It's about:
- Feature selection: Which features to track
- Error computation: How to measure visual error
- Control design: How to map error to motion
- System integration: Making it all work together
Algorithms are tools. Understanding when and how to use them is the real skill.
Future Work
1. Full IBVS Control Loop Implementation
This project focused on feature detection and tracking. Next steps:
- Implement interaction matrix computation
- Add control law (proportional, PID, adaptive)
- Integrate with robot kinematics
- Test on real hardware
2. Switching to PBVS (Position-Based Visual Servoing)
PBVS uses 3D pose estimation instead of 2D features. Compare:
- IBVS: Direct image-space control, no 3D model needed
- PBVS: 3D control, requires pose estimation, more intuitive
Hybrid approaches combine both.
3. Adding Predictive Control
Current system is reactive. Predictive control:
- Estimates future feature positions
- Compensates for latency
- Improves tracking of fast-moving targets
4. Real-Hardware Implementation
Simulation is one thing. Real hardware is another:
- Camera calibration (intrinsic/extrinsic parameters)
- Latency compensation
- Hardware constraints (actuator limits, safety)
- Performance improvements
5. Multi-Feature Adaptive IBVS
Current system uses fixed feature sets. Adaptive IBVS:
- Dynamically selects best features
- Adapts to changing conditions
- Handles feature loss gracefully
- Optimizes feature distribution
6. Deep Learning Integration
Modern approaches use learned features:
- SuperPoint: Learned keypoint detector
- SuperGlue: Learned feature matcher
- RAFT: Learned optical flow
These might outperform traditional methods, but require training data and computational resources.
The Bottom Line
Image-Based Visual Servoing is where computer vision meets control theory. It's about closing the loop between perception and action, using visual feedback to guide robot motion.
This project taught me that:
- Feature detection is foundational: Without stable features, IBVS fails
- Tracking is critical: Features must persist across frames
- Reliability is essential: Real-world conditions are messy
- Metrics matter: Composite metrics reveal true performance
- Processing speed constraints are hard: Every millisecond counts
- Systems thinking is crucial: Algorithms don't exist in isolation
The Jacobian matrix has one job, and half the time it reminds me who is actually in control — not me. But when everything aligns — stable features, reliable tracking, well-tuned control — IBVS is elegant. The robot sees, understands, and acts.
And that's the power of visual servoing. It's not just about making robots see. It's about making them see and respond, intelligently.
Every debugging session made me feel like a camera whisperer. But now, I understand the language. And that's progress.
Tech Stack: Python, OpenCV, NumPy, Pandas, Matplotlib, Lucas-Kanade Optical Flow
Concepts: Image-Based Visual Servoing, Feature Detection, Optical Flow Tracking, Control Theory, UAV Vision
Year: 2024
Dataset: UAV123_10fps Boat1 Sequence (301 frames)