Project Gallery
01 Project Overview
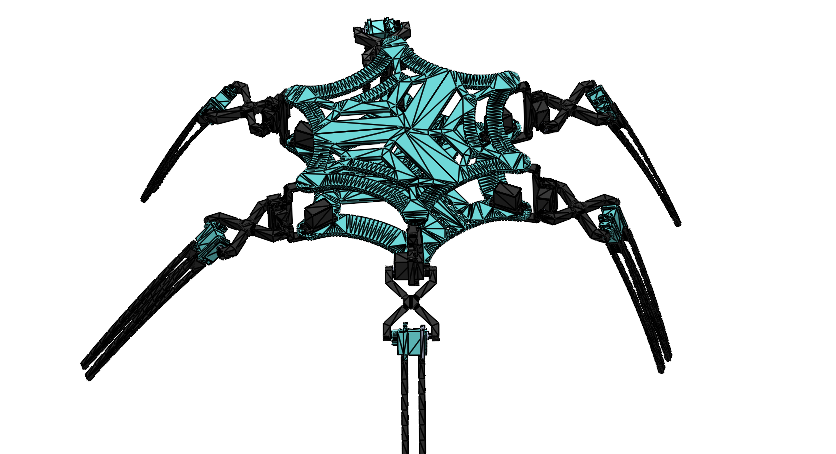
A six-legged hexapod robot demonstrating biomimetic locomotion, forward/inverse kinematics, and multi-legged gait planning. The project includes URDF design, Gazebo simulation, and ROS control basics for stable walking across multiple gait patterns.
02 Key Features & Achievements
Complete mechanical design with 3-DOF legs (18 total degrees of freedom) fabricated via 3D printing
Implemented tripod gait, wave gait, and ripple gait patterns
Transformation matrix system for calculating foot positions and joint configurations
Adapted hexapod simulation with custom kinematics parameters
Coordinated control of 18 servos for stable locomotion
Iterative design process with multiple versions optimized for weight and strength
03 Technical Stack
04 Challenges & Solutions
System integration and optimization
Through systematic problem-solving and iterative development, we addressed these challenges by implementing robust algorithms, optimizing system architecture, and conducting extensive testing to ensure reliability and performance.
05 Key Achievements
Achieved stable walking using tripod gait pattern
Demonstrated multiple gait patterns (tripod, wave, ripple)
Maintained static stability through proper center-of-mass management
Successfully adapted Gazebo simulation for testing
06 Key Takeaways
Kinematics Fundamentals: Deep understanding of forward and inverse kinematics is essential for legged robots
Understanding gait patterns and their trade-offs is crucial for effective locomotion
The leg geometry constrains control possibilities; the control algorithms must respect mechanical limits
Iterative Design Process: First prototypes rarely work perfectly