Project Gallery
01 Project Overview
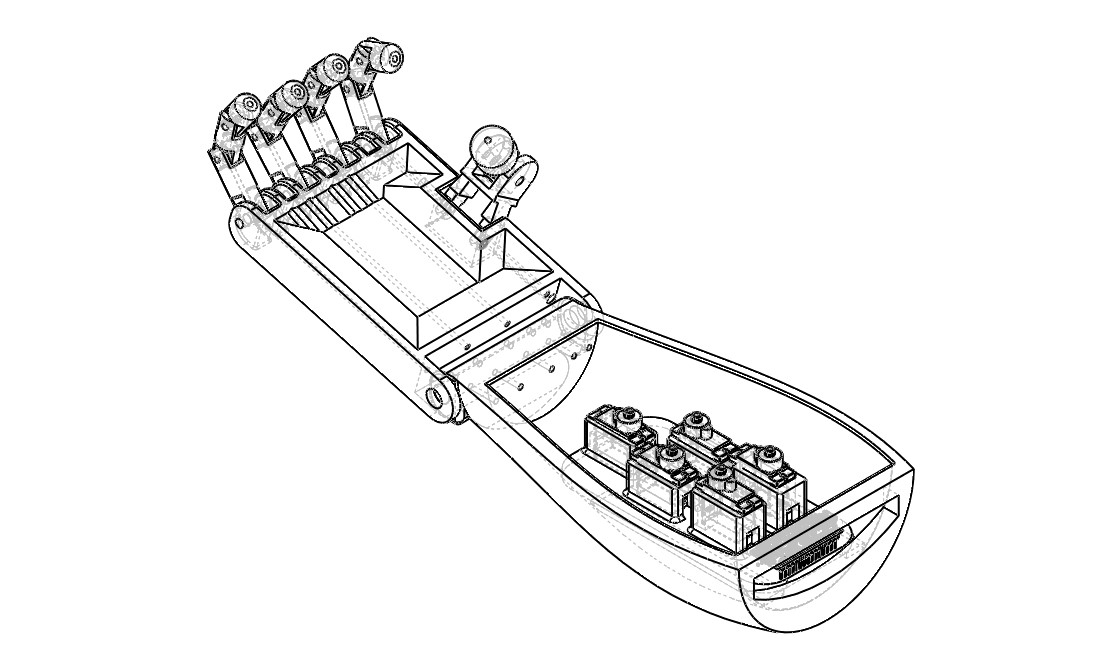
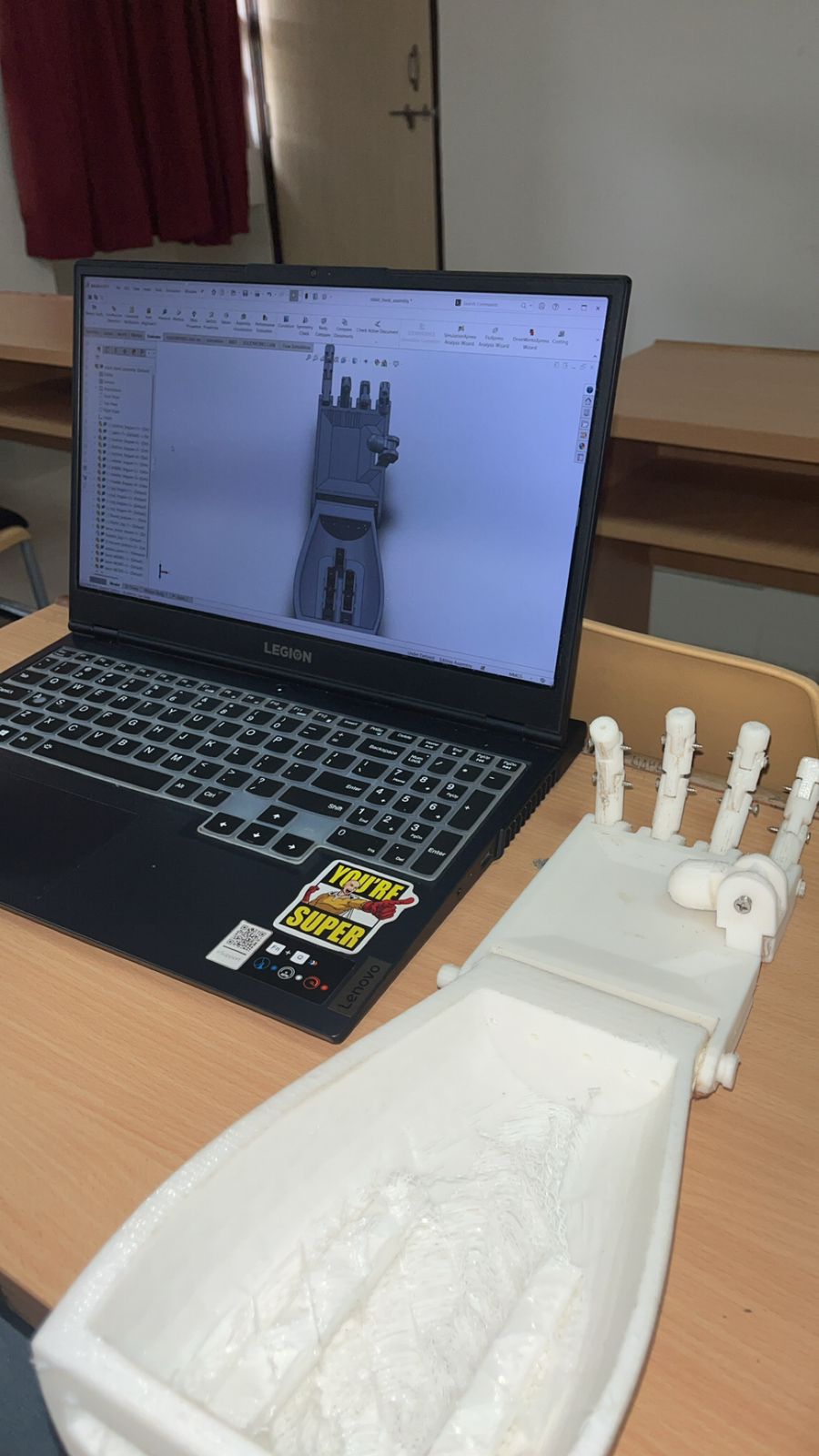
Developed a gesture-controlled anthropomorphic robotic hand that replicates human hand movements using MediaPipe hand tracking, OpenCV computer vision, and servo motor actuation. The system achieves gesture replication with 100-150ms latency, enabling intuitive human-robot interaction for applications in prosthetics and assistive robotics. The hand features 5 fingers with 14 degrees of freedom, fully 3D-printed using PLA filament, with tendon-based actuation that mimics human hand anatomy.
02 Key Features & Achievements
Gesture-controlled anthropomorphic robotic hand with 5 fingers and 14 degrees of freedom
MediaPipe Hands API integration for detecting 21 key landmarks on human hand
Computer vision pipeline with OpenCV for image processing and hand detection
Embedded control system using Arduino Uno to drive 5 servo motors via PWM signals
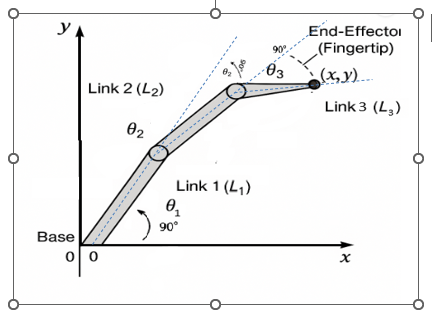
Forward and inverse kinematics analysis for 3-link planar finger manipulators
FEA stress analysis using SolidWorks Simulation to validate structural integrity
Tendon-based actuation system mimicking human hand anatomy
Serial communication protocol for data transfer between Python and Arduino
03 Technical Stack
04 Challenges & Solutions
Challenge 1
Servo Synchronization Problem
Solution
Implemented a coordinated motion algorithm that calculates all servo positions simultaneously and moves them in sync. Created calibration lookup tables for each servo to account for non-linear PWM signal to position mapping and dead zones, ensuring smooth, natural-looking gestures.
Challenge 2
Tendon Routing Nightmare
Solution
Designed and implemented small pulleys and guides to route the five tendons more efficiently through the compact palm. This reduced friction, prevented tangling, and made finger movements smoother through multiple design iterations and careful routing path optimization.
Challenge 3
Processing Latency
Solution
Improved the entire pipeline by reducing unnecessary processing, using efficient serial communication protocols, and profiling code to identify bottlenecks. Achieved 100-150ms total latency (camera capture ~33ms, MediaPipe processing ~10-20ms, serial communication ~5-10ms, servo response ~50-100ms) which is acceptable for most gestures.
Challenge 4
Lighting and Background Sensitivity
Solution
Implemented adaptive thresholding and background subtraction techniques to improve reliability. While the system works best in controlled environments, these preprocessing steps improved hand detection reliability in varying lighting conditions and cluttered backgrounds.
05 Key Achievements
Real-time gesture replication with 100-150ms end-to-end latency (camera capture to servo response)