Project Gallery
01 Project Overview
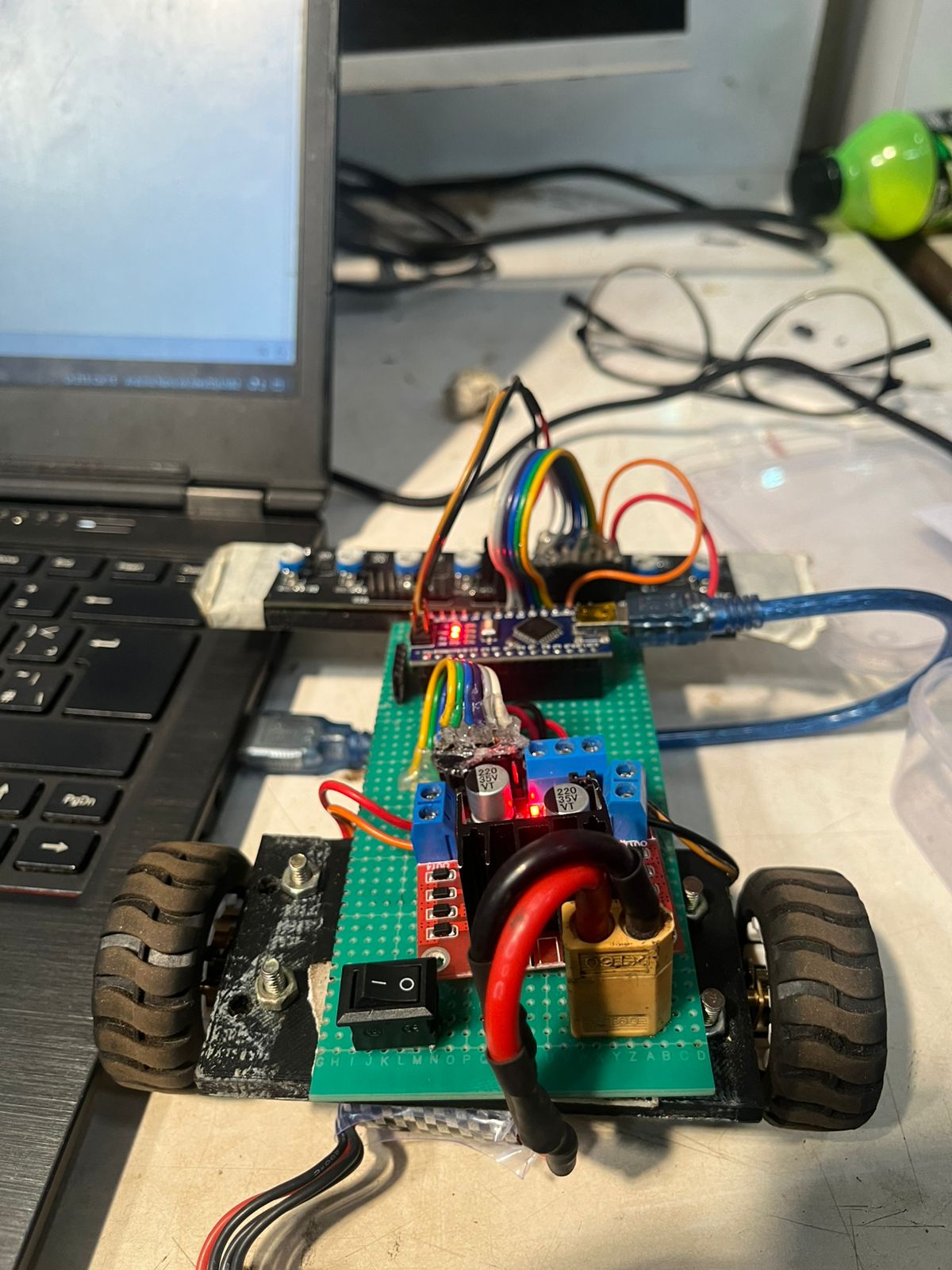
A high-speed line follower robot developed for the BITS Goa competition, achieving All India Rank 7. As Robotics Head, I headed the entire development effort, focusing on achieving maximum speed in the least amount of time while maintaining stability. The project required perfecting every aspect: mechanical design had to be stable yet sleek and fast, electronics had to handle motor heating and wiring challenges, and code had to be perfected through meticulous PID tuning. Developed over an intensive one-month period, the robot featured an 8-sensor IR array, carefully tuned PID control, and efficient hardware for maximum performance.
02 Key Features & Achievements
8-sensor IR array with tuned sensor spacing for precise line position detection
PID control system perfected through meticulous tuning for optimal balance of speed, accuracy, and stability
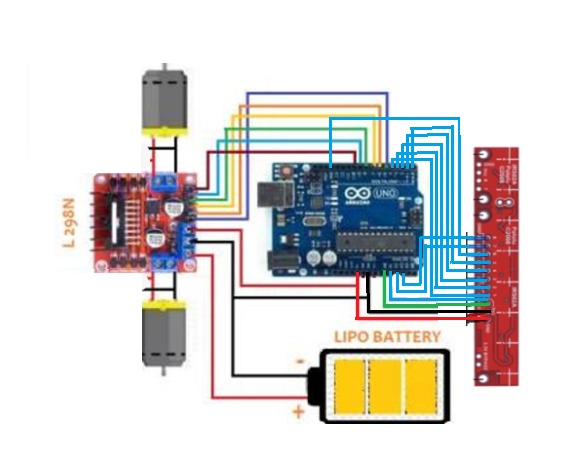
High-speed motor system with 600 RPM motors and L298 drivers, with thermal management for sustained operation
Mechanical design balancing stability, weight, and performance for competition
Electronics management with careful wiring and thermal management to handle motor heating
Arduino Nano-based control system with minimal processing delay and efficient code
98% tracking accuracy at speeds up to 1.2 m/s validated through extensive testing
03 Technical Stack
04 Challenges & Solutions
Challenge 1
Oscillation Issues: Initial PID tuning caused the robot to oscillate around the line. Too much proportional gain created instability, making the robot overshoot and correct repeatedly.
Solution
Implemented systematic PID tuning process: reduced proportional (P) gain and increased derivative (D) gain for damping. Used iterative testing methodology starting with P-only control, then adding D for stability, and finally I for steady-state accuracy. Fine-tuned all three parameters together through multiple test runs on different track configurations.
Challenge 2
Speed vs. Accuracy Trade-off: Increasing speed initially reduced tracking accuracy. The robot struggled to maintain line following precision at higher velocities, creating a fundamental performance conflict.
Solution
Improved both hardware and software simultaneously: reduced robot weight for better acceleration, improved motor performance characteristics, and enhanced control algorithm responsiveness. Developed faster control response times while maintaining accuracy through careful PID parameter tuning and sensor processing improvements.
Challenge 3
Motor Heating: Continuous operation at maximum speed caused significant temperature rise in motors, threatening reliability and performance during extended runs and competition.
Solution
Tested multiple motor configurations balancing speed ratings with torque requirements and thermal characteristics. Selected motors that provided required performance while maintaining reliability under thermal stress. Implemented thermal-aware performance management and monitored motor temperature during testing to ensure consistent operation.
Challenge 4
Track Variations: Different track configurations revealed weaknesses. Sharp turns required different tuning than straight sections, and varying line widths challenged the sensor array's effectiveness.
Solution
Developed a PID configuration that handled various scenarios through extensive testing on multiple track types. Adjusted sensor array spacing and placement for better resolution across different line widths. Created a single parameter set that balanced responsiveness for sharp turns with stability for straight sections.
Challenge 5
Balancing Competing Requirements: Mechanical design had to be stable yet sleek and fast simultaneously. Electronics needed to handle motor heating and wiring challenges while maintaining reliability. Code required perfection through systematic tuning under tight one-month timeline.
Solution
Implemented systematic hardware-software co-optimization approach. Designed chassis with low center of gravity for stability, lightweight materials for speed, and compact form factor for sleekness. Managed electronics with proper wire routing, appropriate wire gauge, and thermal management strategies. Perfected code through meticulous PID tuning with systematic testing methodology, measuring tracking accuracy, maximum speed, stability, and consistency across runs.
05 Key Achievements
All India Rank 7 at BITS Goa competition
98% tracking accuracy at speeds up to 1.2 m/s
Robust performance across various track configurations
Reliable operation validated through extensive testing